|
qBot - QLands little Crawler
hover or click the images below for animations or bigger versions
|
|
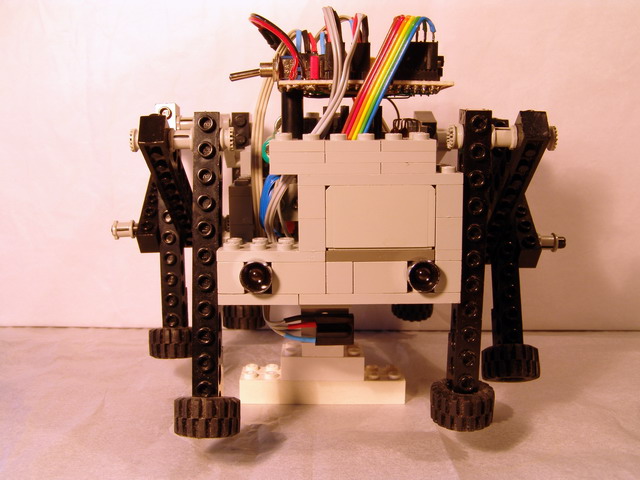
qBot is a six legged highly agile and noisy little plastic insect, even if insects are much more intelligent, qBot will find its way - anyway ... short description |
|
This model of qBot is little involved only, it stalks around blind, it has no distance sensors like the other ones. Although it has two independent motors to walk back and forth, also it is able to turn around on a very small spot. To keep the robot on course and its steps synchronized, sensors on the left and right leg gears are sending their signals to a microcontroller on top of the crawler, that tries stabilize walking. Without this, walking would be more a tumbling around only. |
|
|
A further disadvantage of this model series is that it is averse to sun light. Because it works with open assembled fork light barriers on infrared basis for step sync, walking into direct sunlight disturbs the crawler, it could even stop or walk in circles suddenly. |
 |
|
Evolution never stops and so it incubates this new series. All advantages from its forerunner, but additionally equipped with two front infrared diodes and an infrared sensor on bottom of the frame for detecting obstacles in the way before bumping on them. Now we are t(w)alking. |
|
|
On top of the electronic a LED bar is mounted, to show on which side and how far a barrier is ahead. The distance sensing is done with the same microcontroller that syncs steps, the used LED and sensor parts are lowest cost, no special distance sensor is necessary. All seems OK, the moving hand is detected, so let's go for a walk. |
|
|
It walks and works, we see what it means not to be blind. Stumbling blocks are walked around. Also the problem with direct sunlight has been solved by using magnetic sensors for step sync. |
|
|
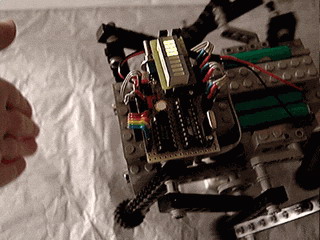
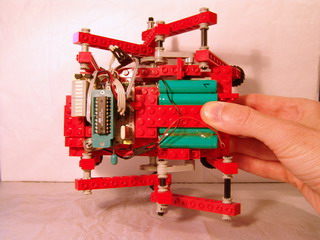
A top view of the frame. You can see the LED bar display for distance detection, the microcontroller in a test socket, rechargeable batteries and the leg mechanics. As microcontroller a Atmel ATTiny 2313 or Atmel 89C2051 with 2 K of FLASH is used. Underneath the controller circuit, two bridge drivers power the motors. MOSFET transistors are used to keep resistance losses as small as possible. |
|
|
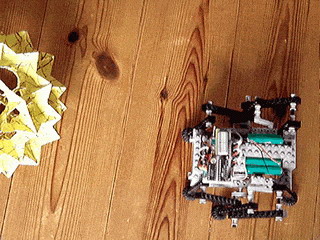
At last the bottom view. On the left side of the picture - the front of the robot, the distance detector is mounted. This one sensor handles the two LEDs on the front. In millisecond cycles - alternating left and right, they are sending infrared pulses, these are reflected by the surrounding area and then received by the sensor in the middle. The intensity of the pulses and the sensibility of the sensor is adjusted to work even in direct sunlight. As I said before, no special distance sensor was used. The accuracy of the distance measuring lies about at 1 cm within 10 cm and about 10 cm within 1 m. |
|
